

Ijraset Journal For Research in Applied Science and Engineering Technology
A Review on the Fault-Tolerant Method of PMSM using Finite Element Method by Modifying Phase Angle for EV Applications
Authors: Abeena A, Ajeena A, Archana P, Remya K P , Saranya Nair
DOI Link: https://doi.org/10.22214/ijraset.2024.58471
Certificate: View Certificate
Abstract
The present research reviews a fault-tolerant technique for Permanent Magnet Synchronous Motors (PMSMs) that involves phase angle adjustment. Fault tolerance standards for the motor used in electric vehicles are necessary due to the rapid development of these vehicles. The primary option for electric vehicle drive motors is increasingly being replaced with permanent magnet synchronous motors (PMSM), which have minimal torque ripple, great durability, and other benefits. After comparing a six-phase PMSM to a conventional three-phase PMSM, the performance following a phase open is examined. A fault-tolerant technique for modifying the left phase current\'s phase angle to reduce torque ripple following a phase open is then described. The finite element simulation indicates that the six-phase PMSM\'s output torque ripple is reduced, and the fault-tolerant technique that is being described can further reduce the torque ripple.
Introduction
I. INTRODUCTION
The motor serves as the electrical vehicle drive system's power supply, and multi-phase PMSM motors are typically found in electric buses and other electric vehicles with strict fault tolerance specifications. By increasing the phase number, a multi-phase motor can achieve fault-tolerant operating in the phase-open state by offering a greater degree of control freedom compared to a three-phase motor.
The development of fault detection and diagnostic (FDD) technology is predicated on the use of monitoring systems. The monitoring of motor-related operating parameters, such as current, voltage, flux, speed, temperature, vibration, noise, and partial discharge, and the application of the proper technique to assess the motor's current operating condition are referred to as PMSM driving system fault monitoring and diagnosis technologies.
If the motor is malfunctioning, more information about the kind of failure, its position, its severity, and its development trend must be obtained. To prevent the occurrence of harmful accidents, this enables the site operators to supply the information required for a reasonable arrangement.
Even if a multi-phase motor can continue to operate in a fault-tolerant manner after a phase open fault in the motor drive system, the failure will negatively impact the torque ripple of the motor. The multi-phase induction motor's stator magneto motive force (MMF) in the phase open state is examined, and a non-disturbing rotating MMF approach is suggested to lessen the torque ripple brought on by the phase open. The most effective course of action for current control is suggested to minimize torque ripple. For both single and multiple faults, fault-tolerant control can be achieved with this method. Based on the optimal current calculation, a mathematical model of the motor phase loss is constructed and the decoupling vector control is implemented. In addition, the effects of spatial harmonics and leakage inductance on the torque ripple are examined, and a corresponding suppression technique is suggested to further lessen the torque ripple.
The conventional three-phase PMSM and the one-phase open's performance are first compared. The fault-tolerant technique of lowering the torque ripple by modifying the phase angle of the left phase current is then proposed, based on the analysis theory of MMF. Ansoft, a finite element application, verifies that the fault-tolerant approach is valid.
II. PMSM SIX-PHASE WINDINGS
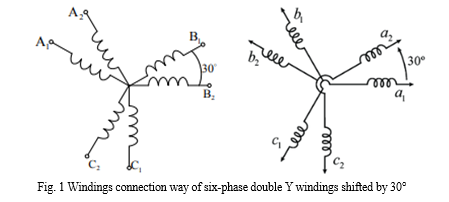
The two sets of three-phase windings that make up the six-phase windings have an electrical angle difference of 120°, while the corresponding phases have an electrical angle difference of 30°. As illustrated in Fig. 1, the six-phase double Y windings' connecting path and phase electromotive force (EMF) vector diagram have been changed by 30°.
III. REDUCING THE TORQUE RIPPLE OF ONE PHASE OPEN
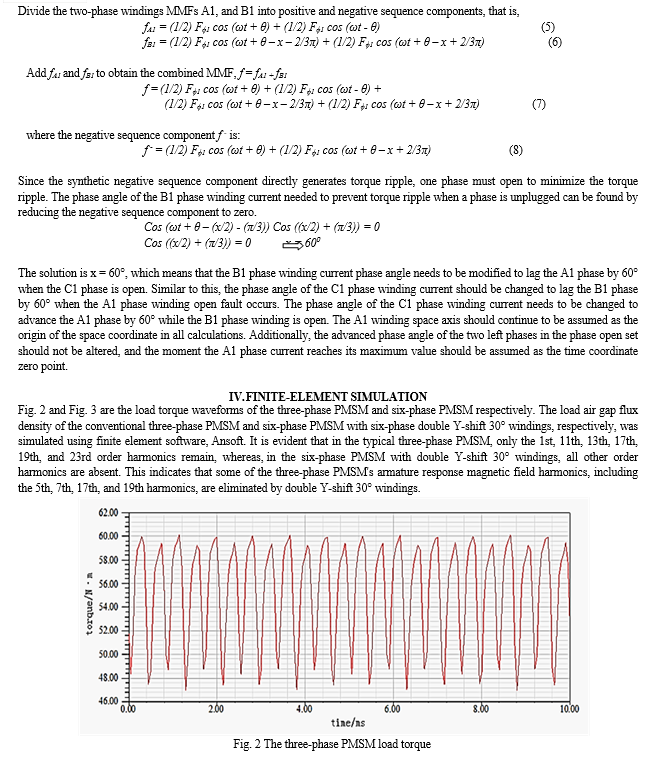
The six-phase double Y-shift 30° windings PMSM can still output enough torque to keep the electric vehicle operating when the motor phase opens, but the torque ripple will be larger in the motor as compared to the three-phase PMSM. It is necessary to feed the three-phase symmetrical currents into the three-phase symmetrical windings of the PMSMs to guarantee that the stator synthesis MMF forms a circular rotating magnetic field. Thus, the winding space phase and the current time phase are both connected to the stator synthesis MMF. A circular revolving magnetic field is created solely by the positive sequence component that is created by the winding current. The torque ripple induced by the negative sequence synthetic component increases if the six-phase double Y-shift 30° windings PMSM works in the phase open since each phase's negative sequence cannot counteract the other's.
Considering the A1 winding space axis as the origin of the space coordinate and the moment at which the A1 phase current reaches its maximum value as the time coordinate zero point, it is assumed that the C1 phase winding open fault occurs. This assumption is based on the winding symmetry, which indicates that assuming any phase open will be reasonable and will not affect the analysis result. It is possible to think of the six-phase double Y-shift 30° windings as two sets of three-phase windings: three-phase windings {A1, B1, C1} and three-phase windings {A2, B2, C2}. The left five phases continue to operate while the C1 phase winding is open, or when iC1 = 0. Zero sequence synthetic component exists in one set of {A2, B2, C2} three-phase windings since they are still supplied symmetrical currents. However, the synthetic MMF of the two phases' windings, A1 and B1, results in non-zero negative sequence components. Therefore, the torque ripple can be minimized if there is a way to remove the synthetic negative sequence component.
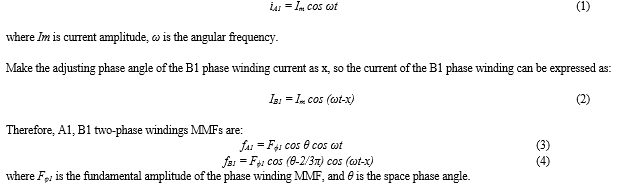
The left phase windings space position cannot be altered when a single phase is open; this means that the B1 phase winding axis will always lag the A1 phase by 120°. However, the controller can determine the time angle of each phase. The A1 phase current can be described as follows if the time coordinate zero point is chosen to be the moment the current reaches its highest value.

Conclusion
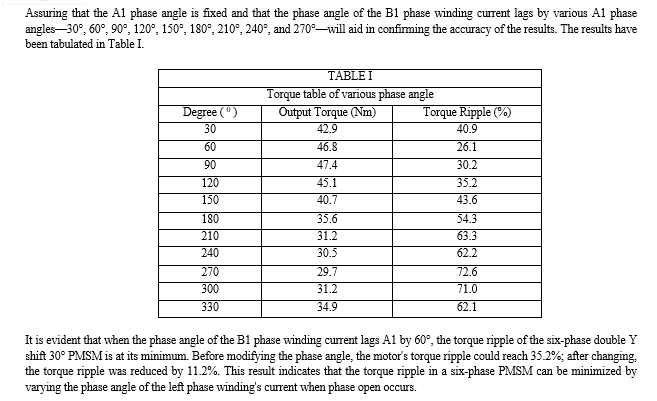
The paper presents the design of a six-phase winding PMSM intended for use in electric vehicles. When a single phase fault arises, the minimum torque ripple can be obtained by removing the negative sequence component of the MMF and modifying the left windings\' phase angle. It is inferred that without altering the phase angle of the A1 phase, the phase angle of the B1 phase winding current should lag by 60° when the C1 phase is open. Likewise, the following outcomes are attained. The phase angle of the C1 phase winding current should be set to lag the B1 phase by 60° when the A1 phase winding is open. The phase angle of the C1 phase winding current needs to be changed to advance the A1 phase by 60° while the B1 phase winding is open. The same logic applies if a phase within another phase is open. According to the simulation results, the torque ripple can be reduced by 11.2% by modifying the left phase angle approach.
References
[1] D. Ting, L. Fenghui and S. Li, \"Fault-tolerant method for six-phase PMSM by adjusting phase angle,\" 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 2017, pp. 1-5, doi: 10.1109/ICEMS.2017.8056190. [2] Lim Y, Kim J, Kim J. A study of the characteristics of traction motor performance for EV by electrical steel [C]//Electric Drives Production Conference (EDPC), 2012 2nd International. IEEE, 2012: 1-3. [3] Wang Yongxing, Wen Xuhui, Zhao Feng. Fault-tolerant control for six-phase permanent magnet synchronous machines with one phase open [J]. Transaction of China Electrotechnical Society, 2015, 30(5): 49-58 [4] Villani M, Tursini M, Fabri G, et al. High-Reliability Permanent Magnet Brushless Motor Drive for Aircraft Application [J]. IEEE Transactions on Industrial Electronics, 2012, 59(5):2073-2081. [5] Liu Zicheng, Zheng Zedong, et al. Fixed joint double fifteen-phase induction motor control and fault-tolerant control in ship propulsion system [J]. Transaction of China Electrotechnical Society, 2014, 29(3): 65-74 [6] Kang M, Kong W B, Huang J. Fault-tolerant control of five-phase induction motor for electric vehicles [J]. Electric Machines & Control, 2014, 18(3):1-6. [7] D. Kastha and B. K. Bose, \"Fault mode single-phase operation of variable frequency induction motor drive and improvement of pulsating torque characteristics\", IEEE Trans. Ind. Electron., vol. 41, no. 4, pp. 426-433, Aug. 1994. [8] Mendes A M S, Cardoso A J M. Fault-tolerant operating strategies applied to three-phase induction–-motor drives [J]. IEEE Transactions on Industrial Electronics, 2006, 53(6): 1807-1817. [9] M. B. R. Corra, C. B. Jacobina, E. R. C. Silva and A. M. N. Lima, \"An induction motor drive system with improved fault tolerance\", IEEE Trans. Ind. Appl., vol. 37, no. 3, pp. 873-879, May/Jun. 2001. [10] C.-Y. Lee and W.-J. Lee, \"Effects of nonsinusoidal voltage on the operation performance of a three-phase induction motor\", IEEE Trans. Energy Convers., vol. 14, no. 2, pp. 193-201, Jun. 1999 [11] C. Olivieri, G. Fabri, and M. Tursini, \"Sensorless control of five-phase brushless DC motors\", Proc. 1st Symp. SLED, pp. 24-31, 2010. [12] Hao Z, Hu Y, Huang W, et al. Optimal current direct control strategy for fault-tolerant permanent magnet motor [J]. Proceedings of the Chinese Society of Electrical Engineering, 2011, 31(6):46-51.
Copyright
Copyright © 2024 Abeena A, Ajeena A, Archana P, Remya K P , Saranya Nair . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET58471
Publish Date : 2024-02-16
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online